Un sistema robótico clasifica las naranjas
Un nuevo sistema robótico es capaz de clasificar automáticamente las naranjas. Por medio de robots industriales ABB y técnicas de visión artificial se automatiza la clasificación de estas frutas según su tamaño y grado de madurez, para almacenarlas y transportarlas hacia los puntos de comercialización.
Como parte del proyecto final del curso de Robótica que dicta el profesor Pedro Cárdenas, del Departamento de Ingeniería Mecánica y Mecatrónica de la Universidad Nacional de Colombia (UNAL), los estudiantes atendieron la misión de desarrollar una aplicación de robótica industrial para el sector agropecuario, lo más cercana posible a la realidad.
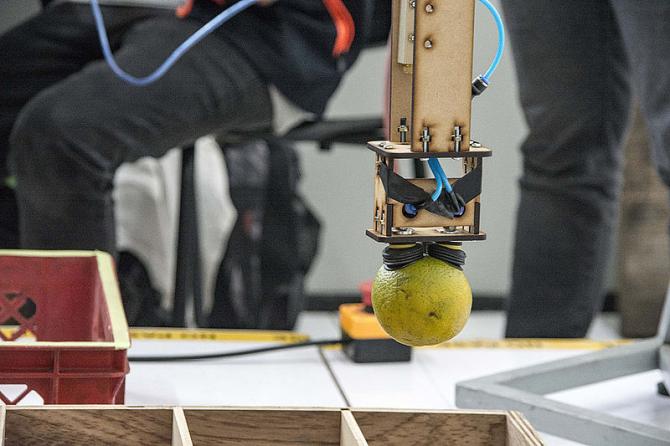
En este caso se trató de diseñar un gripper, o pinza para recoger naranjas, e integrarlo a un sistema para clasificarlas automáticamente. El propósito de los estudiantes de Ingeniería Mecatrónica Jurgen Krejci, Alejandro Marín, Sebastián Realpe, Johan Ramírez y Luis Rodríguez fue escalar a nivel industrial lo que habían conseguido antes con un clasificador de fresas desarrollado en Lego Mindstorms.
Para ello utilizaron una cámara de profundidad –como la Kinect de la consola de videojuegos Xbox 360– para detectar dónde están las frutas, una banda de transporte para la salida del material, dos robots ABB –que suelen tener diferentes fabricas–, y una herramienta diseñada por ellos que agarra las naranjas mediante la succión de unas ventosas.
“Es un sistema conformado por la unidad mecánica y una controladora. La primera se refiere a los motores, es decir el robot, mientras que desde la segunda se dan las indicaciones sobre cómo se debe mover”, explica el estudiante Realpe, quien estuvo encargado de la configuración de la comunicación.
Con el algoritmo de visión desarrollado por los estudiantes se detecta la posición de las frutas en la canasta, información que se procesa en el computador a través de una forma de comunicación industrial y se le transmiten esos datos al controlador del robot, que tiene un código esperando a recibirlos.
“Cuando el controlador tenía esa posición le decía al robot cómo moverse, de manera que él se posicionaba encima de la fruta, la recogía y la llevaba al lugar de clasificación, en un ciclo en el que continuaba moviéndose automáticamente”, detalla el estudiante Realpe al explicar el funcionamiento del sistema.
Para el estudiante Krejci, coordinador del semillero MomentUN, del cual forman parte los miembros del equipo, este proyecto evidencia además las oportunidades que pueden representar la robótica y la automatización para brindarles soluciones al sector agropecuario optimizando sus procesos y haciéndolos más competitivos frente a los países que ya tienen automatizada la recolección y clasificación de las frutas.
Este proyecto fue presentado por los estudiantes a la comunidad universitaria en el marco del Mecatronic´s day, un evento organizado por el semillero MomentUN y el profesor Cárdenas para divulgar entre el público los trabajos que se desarrollan en las diferentes asignaturas de Ingeniería Mecatrónica.
“Desde hace unos años hemos visto que el potencial de nuestros muchachos es muy grande y que hacen cosas muy interesantes, pero se nos estaban quedando en el aula. Encontramos un fenómeno, y es que los estudiantes de los primeros semestres no conocían lo que hicieron sus compañeros de semestres anteriores”, comenta el docente.
A través de jornadas académicas y de una muestra de proyectos se generó un espacio de encuentro entre los estudiantes de la carrera, egresados y la comunidad universitaria en general.