Un robot ‘transformer’ que se inspira en animales para moverse por tierra y aire
Los leones marinos usan las aletas para nadar y caminar, los pájaros chukar se apoyan en las alas para subir pendientes pronunciadas. Ingenieros de EE UU se han basado en la observación de la locomoción de distintas especies para construir un autómata que se desplaza por múltiples entornos. Entre sus usos, se encuentran las exploraciones espaciales, labores de rescate y envíos de paquetes.
Los investigadores esperan que la plataforma sea útil para las exploraciones en Marte. / Eric Sihite / Nature Communications
Un equipo de la Universidad del Noreste (Boston, EE UU) ha diseñado un robot que puede desplazarse por diversos entornos, tanto por tierra como por aire. Para ello, el autómata transforma sus apéndices de ruedas a propulsores y de piernas a manos. Los resultados se detallan hoy en la revista Nature Communications.
Bautizado técnicamente como M4, pero apodado Morphobot, el invento se ha diseñado para múltiples ámbitos de aplicación, entre ellos, “exploraciones de Marte, entrega automatizada de paquetes en zonas residenciales, así como labores de búsqueda y rescate tras catástrofes naturales”, explica a SINC Alireza Ramezani, profesor del departamento de Ingeniería Eléctrica e Informática en la universidad estadounidense y autor principal del trabajo. Además, los hallazgos también pueden ser útiles para mejorar los dispositivos ya destinados a estos usos específicos.
Morphobot es capaz de transformar sus apéndices de ruedas a propulsores y de piernas a manos
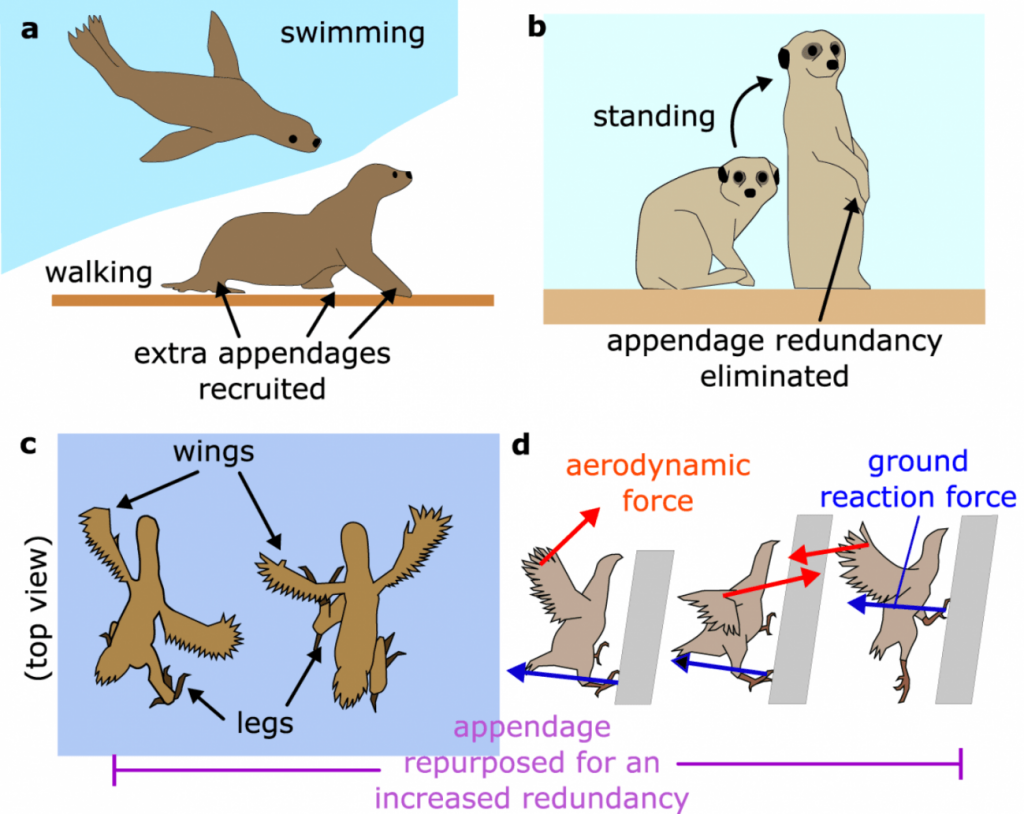
Los investigadores se han inspirado en animales como aves, suricatos y focas para crear este robot. Algunas especies pueden adaptar el uso de sus extremidades para enfrentarse a distintos terrenos.
Por ejemplo, los leones marinos pueden caminar por tierra con las aletas, los suricatos se sostienen sobre las extremidades posteriores para explorar su entorno y los pájaros chukar pueden usar las alas para subir a cuatro patas por pendientes pronunciadas.
“Tenemos curiosidad por entender cómo las aves, a pesar de su pequeño tamaño corporal, muestran numerosos modos de movilidad”, declara Ramezani. “Copiar la locomoción de las aves plantea importantes retos”.
El autómata imita la locomoción de algunos animales. / Eric Sihite / Nature Communications
Imitando la capacidad de reutilización de las extremidades de los animales, pueden diseñarse robots móviles con extremidades multifuncionales que les permita adaptar sus estrategias de movimiento a espacios complejos.
El autómata es capaz de volar, rodar, arrastrarse, agacharse y dar volteretas
Bajo esta premisa, el equipo científico desarrolló este robot que puede moverse con versatilidad por distintos entornos. Morphobot vuela, rueda, se arrastra, se agacha, hace equilibrios y da volteretas. Esto le permite caminar por terrenos abruptos, atravesar pendientes pronunciadas, superar grandes obstáculos o atravesar senderos de techo bajo.
Ramezani y sus colegas se han tenido que enfrentar a una serie de dificultades para lograr el diseño final. “Cumplir los requisitos contradictorios que imponen los diferentes modos de locomoción en una sola plataforma es un enorme desafío”, destaca el ingeniero. “Los robots terrestres necesitan componentes voluminosos, mientras que los aéreos requieren estructuras ligeras. Integrar estos requisitos en un único aparato puede ser todo un reto”.
El robot puede volar, rodar, arrastrarse, agacharse y dar volteretas. / Eric Sihite / Nature Communications
Morphobot tiene cuatro patas con dos articulaciones cada una y ventiladores en los extremos. Con un peso de seis kilos, mide 70 centímetros de largo y 35 de alto, ancho y alto. Además, los ventiladores pueden funcionar como patas, propulsores o ruedas.
Integrar todos los requisitos de los distintos modos de locomoción en una única plataforma es todo un reto
Alireza Ramezani, autor principal del estudio
Los investigadores todavía deben dar varios pasos antes de aplicar el invento a la vida real. Como una de sus utilidades pretende ser las exploraciones en Marte, “necesitamos mejorar la resistencia espacial, es decir, debe ser capaz de operar en entornos hostiles”, señala Ramezani.
De todos modos, los resultados recabados hasta ahora demuestran las ventajas de diseñar robots con apéndices polivalentes para desplazarse por terrenos variados y difíciles, destacan los autores.
Referencia:
Ramezani, A. “Multi-Modal Mobility Morphobot (M4) with appendage repurposing for locomotion plasticity enhancement” Nature Communications (2023)