Ponen a prueba la capacidad todoterreno del rover robótico VIPER
Siguen avanzando las pruebas para validar el buen funcionamiento del robot VIPER (Volatiles Investigating Polar Exploration Rover) de la NASA y los preparativos para enviarlo a la superficie de la Luna, donde su misión será buscar agua. Esta misión ha levantado muchas expectativas y se espera que marque el inicio de una etapa de mucha mayor presencia de la agencia espacial estadounidense en la Luna.
La más reciente tanda de pruebas a la que el VIPER ha sido sometido recuerda a una carrera de obstáculos, con grandes baches comparables a cráteres lunares, pedruscos por encima de los cuales hay que pasar, y arenales tan peligrosos como uno de Marte en el que quedó atrapado para siempre el robot Spirit.
Estas pruebas son las más realistas realizadas hasta la fecha sobre la capacidad del VIPER para circular por los terrenos más difíciles durante su misión en el Polo Sur de la Luna.
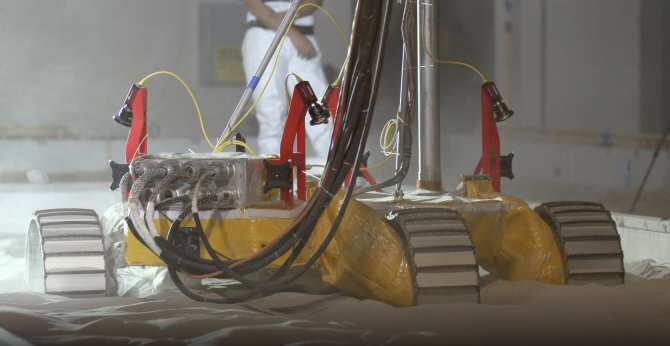
Los ingenieros probaron la última unidad de pruebas de ingeniería de movilidad del VIPER, conocida como MGRU3 (Moon Gravitation Representative Unit 3) en el Laboratorio de Operaciones Lunares Simuladas (SLOPE, por sus siglas en inglés)) del Centro de Investigación Glenn de la NASA en la ciudad estadounidense de Cleveland. La MGRU3 cuenta con controladores de motor especialmente diseñados para el rover lunar. Estos controladores son una pieza esencial del sistema de movilidad del rover que controla los motores que envían la energía a las cuatro ruedas del robot.
A diferencia de la mayoría de los motores de los coches, que utilizan un acelerador y un freno para acelerar y frenar las cuatro ruedas, los controladores de motor del VIPER hacen que las ruedas del rover giren con la fuerza y el ritmo que deseen los responsables del robot, con una precisión extrema para permitir un mejor rendimiento, tal como explica Arno Rogg, ingeniero de sistemas del rover en el Centro de Investigación Ames de la NASA en el Silicon Valley (Valle del Silicio) de California. “Estas pruebas nos permitieron verificar el rendimiento del sistema de movilidad del rover y saber que funcionará bien en la Luna”.
Las pruebas también han ayudado a los ingenieros a determinar cuán bien el rover soportará las difíciles condiciones de la superficie lunar.
El equipo técnico del VIPER quería ver si el rover es capaz de avanzar en un terreno de escasa firmeza, en el que se hunda notablemente, o cuánta energía adicional utilizará el robot dependiendo del tipo de obstáculos u otras dificultades con las que se encuentre en un terreno.
Utilizando la última versión del software del vehículo, los ingenieros también probaron la capacidad del prototipo para mover sus ruedas de una forma especial y coordinada, como si se tratara de una oruga moviendo sus patas, que ayuda al vehículo a desatascarse cuando está atrapado en la arena. El prototipo del rover también demostró su capacidad de decidir por su cuenta que debe detenerse cuando se acerca a una pendiente demasiado pronunciada o ante otras situaciones peligrosas.