Nueva revolución industrial: el trabajador humanoide que reemplazará humanos por primera vez
Después de décadas de sueños de ciencia ficción, el robot Apollo 1 marca el comienzo de una revolución del tejido industrial a nivel mundial.

Apollo 1 es el primer trabajador humanoide funcional de la historia, uno que podría trabajar de forma autónoma en una fábrica junto a sus colegas sacos de carne hoy, no dentro de unos años. Todavía no lavará los platos ni trabajará en plataformas petrolíferas, pero al verlo operar, descargando cajas de una cinta transportadora, su diseño parece el correcto, igual que el primer iPhone pareció el correcto la primera vez que lo viste. Hace que el Optimus de Elon Musk parezca un autómata barato robado de una mala película de Will Smith.
Fabricado por Apptronik –una empresa de robótica surgida en 2016 del Laboratorio de Robótica Centrada en el Ser Humano de la Universidad de Texas-, Apollo es la destilación de años de desarrollo de humanoides y del trabajo de diseño del estudio creativo Argodesign, con sede en Austin, que construyen tanto su identidad visual como una nueva experiencia de usuario que va en contra de muchas de nuestras ideas preconcebidas de lo que debería ser un robot humanoide. De hecho, a diferencia de los monstruos del Uncanny Valley con piel de látex, Optimus y todos los aspirantes a R2-D2 que hay por ahí, Apollo redefine muchos de los tópicos que han caracterizado durante décadas a los robots de la literatura de ciencia ficción, los cómics y las películas de Hollywood.
“Ya sabes, todas esas presunciones de ciencia ficción. No te dan una pauta para respaldar tu pensamiento. Te das cuenta de que el público también ve esas películas y de lo que piensa”, me dice Mark Rolston. “Así que te das cuenta de que este es uno de esos [trabajos de diseño] en los que tienes que trabajar desde ahí hacia la realidad. Tenemos que encontrar nuevas respuestas”. El reto era hacer una máquina que se sintiera humanista sin pretender ser humana, como me cuenta Rolston —fundador y director creativo de Argodesign— en una entrevista en vídeo. Apptronik y Argodesign querían establecer un nuevo tipo de relación entre el robot y el ser humano, una relación que la gente normal —acostumbrada a los Terminator y C-3PO de turno— no esperara pero que sintiera familiar al instante. Para lograrlo, el diseño de Apollo no se centró sólo en la estética, sino en crear un lenguaje visual que resonara con los usuarios, garantizando que el robot no sólo fuera funcional, sino también accesible y comprensible para todo el mundo, afirma Rolston.

El estudio se obsesionó con el proyecto. El equipo iteró cientos de veces la forma del rostro de Apolo. Todos sus aspectos, desde la concavidad hasta la distancia entre los ojos, se modularon cuidadosamente. También se les ocurrieron conceptos completamente nuevos e inesperados, como la idea de no utilizar una interfaz oral para comunicarse con los humanos, sino una pantalla de tinta electrónica detrás de su panel facial que utiliza un nuevo lenguaje visual que sigue las mismas convenciones familiares que se encuentran en la típica aplicación de chat.
Futuro robótico
Pero, antes de profundizar en la génesis del diseño y la experiencia de usuario de Apollo, hablemos de los Daleks de la habitación. Inevitablemente, para comprender el alcance de los logros de Apollo, tenemos que compararlo con Atlas y Optimus. El primero es el “Fórmula 1 de los robots humanoides”, según el CEO y cofundador de Apptronik, Jeff Cardenas. Califica al robot fabricado por Boston Dynamics —creadores y torturadores de mulas, perros y acróbatas cibernéticos que ahora son propiedad del complejo industrial surcoreano Hyundai— como una bestia superavanzada capaz de hazañas virales coreografiadas en el laboratorio. Una bestia que, según él, es imposible desplegar en entornos de trabajo reales debido a su naturaleza experimental y a su coste multimillonario. “Siempre hemos imaginado un mundo en el que los robots pudieran trabajar junto a los humanos, no sólo en entornos controlados, sino en escenarios del mundo real. Apollo es la encarnación de esa visión”, afirma.
Optimus, el otro Dalek de la sala, va años por detrás de Apollo en este punto. Mientras que el sueño de Musk se anunció crudamente en 2021 con una persona dentro de un traje, dos de los cofundadores de Apptronik —Nick Paine y Luis Sentis—ya trabajaban en humanoides en el Human Centered Robotics Lab de la Universidad de Texas en Austin en 2013. Ese fue el año en que participaron en el DARPA Robotics Challenge, que les permitió ser seleccionados para trabajar en Valkyrie, el primer robot bípedo de la NASA.
Según Carenas, trabajar con la NASA cambió las reglas del juego, ya que les proporcionó información sobre la construcción de robots capaces de operar en entornos difíciles, lo que influyó directamente en el diseño de Apollo. Y después de Valkyrie, varios robots precedieron a Apollo, cada uno de los cuales contribuyó a la base de conocimientos que finalmente conduciría a su creación. “Cada robot que construimos fue un peldaño hacia Apollo”, afirma. “Es la culminación de varias iteraciones, cada una refinando la visión de una máquina que puede integrarse perfectamente en nuestro mundo”. Recientemente, Apptronik consiguió un nuevo contrato con la NASA para comercializar Apollo en 2024).

Sueños de robot
Apollo destaca por su combinación única de componentes eléctricos. A diferencia de muchos robots que dependen de “músculos” neumáticos, Apollo aprovecha la precisión y eficacia de los componentes eléctricos. Jeff subraya que las piezas eléctricas ofrecen un nivel de control y capacidad de respuesta sin parangón. Es lo que permite a Apollo realizar tareas con una destreza similar a la humana.

Su alma eléctrica también permite una de las características más destacadas de Apollo: Sus baterías intercambiables. Queríamos asegurarnos de que Apollo pudiera trabajar continuamente sin largos tiempos de inactividad”, explica Jeff. “La batería está pensada para una autonomía de cuatro horas, pero depende de lo que esté haciendo”. Gracias al sistema de baterías intercambiables en caliente, Apollo puede funcionar casi sin parar. Están en la espalda del robot. Para cambiarlas, basta con agarrarlas por el asa, sacarlas y cambiarlas en el acto, como si se tratara de una bicicleta eléctrica con baterías intercambiables. “Si estás todo el día levantando cosas pesadas, puedes agotar la batería más rápido. Con una actividad normal, tiene una autonomía de cuatro horas, que es más o menos el mínimo que necesitan nuestros clientes”, explica. “Luego puedes cambiar la batería rápidamente. Así que nuestro objetivo son 22 horas al día, siete días a la semana”.
El viaje de diseño de Apollo es una historia de combinación de forma y función, asegurando que cada elemento no sólo sirva a un propósito, sino que también comunique el mensaje correcto. Rolston afirma que, cuando empezaron a diseñar Apollo, sabían que tenía que ser algo más que una máquina. “Tenía que transmitir emociones, intenciones y, sobre todo, ser simpático”, pero sin serlo en exceso. Un gran reto para el equipo de diseño.
Uno de los obstáculos -y también un conducto- hacia ese objetivo fue la influencia de la ciencia ficción en nuestra percepción de los robots, que según Rolston es innegable. Desde amenazadores gigantes metálicos hasta elegantes asistentes humanoides, la ciencia ficción ha modelado nuestras expectativas. La ciencia ficción nos da un modelo, pero los diseños del mundo real tienen que ir más allá de estas ideas preconcebidas. “Con Apollo, hemos intentado crear una nueva dinámica, que respete las nociones preexistentes pero que también introduzca una nueva perspectiva”.
Una de las características más llamativas de Apollo es su cabeza, una mezcla de forma y función. Mark lo explica. El diseño de la cabeza hueca fue intencionado. Querían transmitir que Apolo no es un ente pensante como los humanos. Es una herramienta, aunque avanzada. “El vacío en la cabeza hace que Apollo parezca más ligero, más accesible y evita el ‘valle misterioso’ en el que caen muchos robots”, señala. El proceso de diseño no estuvo exento de dificultades. Mark recuerda una iteración concreta de hundreds, que era simpática, con hendiduras en las mejillas que le hacían parecer un mono. Era un concepto interesante, pero enviaba el mensaje equivocado. Querían que Apolo se viera como algo avanzado, no primitivo.

El equipo de Argodesign también tuvo que enfrentarse al reto de hacer que Apollo no fuera amenazador. Algunos de los diseños recordaban a calaveras, sobre todo los de caras convexas. La cara cóncava y hueca que finalmente utilizaron elimina de algún modo la sensación de que el robot es una amenaza, mientras que las caras convexas sí parecen amenazadoras, quizá porque nuestras propias caras se perciben como convexas. Cárdenas describe su prueba de miedo definitiva: Hacer que Apollo se sitúe en silencio detrás de una persona. Cuando la persona se da cuenta de que tiene el robot detrás y se gira, ¿se siente amenazada? Con este diseño, la respuesta parece ser siempre negativa. Y, sin embargo, la cara tampoco le parece bonita a nadie. Todas las iteraciones y decisiones parecen haber producido un diseño emocionalmente neutro, al menos según sus pruebas con empleados, colaboradores y clientes.

El equipo de diseño se inspiró en varias fuentes, desde la estética minimalista de Apple hasta las elegantes líneas de las motos deportivas. Éstas, quizá, fueron la mayor influencia en el espíritu del diseño, según Rolston. “La influencia de las motos deportivas es evidente en los esquemas de pintura de Apollo y en las piezas bellamente elaboradas. Da a Apollo una sensación de velocidad y agilidad”. Hacia el final del ciclo de diseño, decidieron reducir aún más el impacto de amenaza del robot utilizando una tela tejida para cubrir algunos de los mecanismos de Apollo, suavizando su aspecto y haciéndolo visualmente más suave.
Comunicación visual
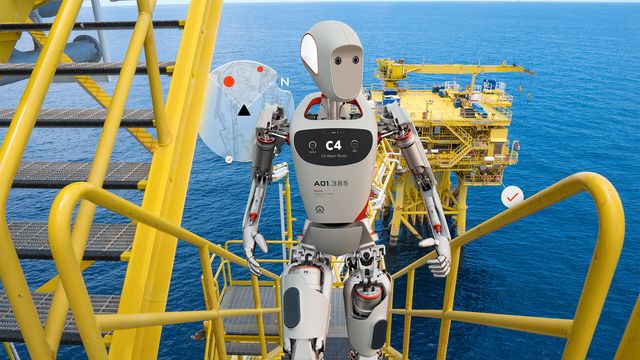
La cara del robot es quizá la mejor parte del ingenio del diseño de Apollo. Detrás de su superficie hay una pantalla de tinta electrónica que es algo más que una mera pantalla para dibujar sonrisas. De hecho, está apagada la mayor parte del tiempo, excepto cuando realmente importa: Cuando Apollo tiene algo que decir, ya sea para responder a una pregunta o indicar un estado. Esa pantalla de tinta electrónica es la principal herramienta de comunicación (también hay una pantalla OLED en el pecho, pero que sólo sirve como placa de identificación, mostrando un nombre personalizado y las estadísticas vitales del robot, como su tarea actual o su nivel de batería, que sirve a los humanos para calibrar rápidamente su estado operativo).
A diferencia de otros prototipos de robot, Apollo no habla. Se trata de una característica de diseño intencionada. De hecho, es la piedra angular de la experiencia del usuario, que define el tipo de interacción que los humanos tienen con Apollo. “Queríamos que Apollo se comunicara sin palabras. La pantalla de papel electrónico le permite transmitir emociones, intenciones y mensajes sencillos”, afirma Rolston. La “boca” del robot puede mostrar palabras dentro de una burbuja de diálogo y determinados iconos. El diseñador destaca, por ejemplo, el uso del símbolo “punto punto punto”, un signo universal de pensamiento y pausa, algo con lo que estamos familiarizados gracias a las aplicaciones de chat de nuestros teléfonos. “Queríamos dar a los humanos una indicación de que Apollo está procesando o ‘pensando’ sin hacerlo demasiado humano o demasiado mono”, dice.
Esto no significa que la UX de Apollo no vaya a evolucionar hacia otra cosa una vez que la tecnología evolucione. Las tareas del robot se controlan básicamente mediante una interfaz en tabletas u ordenadores, por lo que no hay comandos. En otras palabras: Apollo no es Alexa. Eso vendrá después, cuando la IA esté a la altura. Precisamente por eso el lenguaje actual se reduce a esta pantalla de tinta electrónica y a símbolos.

Cárdenas me cuenta que dedicaron mucho tiempo a la parte de desarrollo del software, centrándose en cómo los usuarios pueden dar instrucciones al robot utilizando tabletas. El objetivo era simplificar su interfaz, haciéndola lo más fácil y sencilla posible. “Ahora mismo, una tableta o un ordenador son el principal modo de interacción, pero estamos estudiando métodos de comunicación más directos para el futuro”.
Al igual que ocurre con la UX actual, las tareas que se asignan actualmente a Apollo pueden parecer rudimentarias a ojos inexpertos, pero son fundamentales, afirma. La manipulación de cajas en almacenes, por ejemplo, es una tarea que requiere precisión y fiabilidad. “Las aplicaciones iniciales de Apollo, como la manipulación bruta, son sólo la punta del iceberg. Estas tareas sientan las bases de lo que está por venir”.
El inicio de una revolución
Un área importante de desarrollo futuro será la destreza de Apollo. El equipo de Apptronik está invirtiendo en perfeccionar los dedos del robot para que pueda realizar tareas que requieran un tacto delicado. Cárdenas dice que en el futuro Apollo podrá coger una frágil pieza de cristalería y montar maquinaria compleja: “Hacia allí nos dirigimos. Aumentar la destreza de los dedos de Apollo es una prioridad para nosotros”.

La interacción del robot con los humanos también va a sufrir una transformación, como señala Rolston: “Nuestro diseño ya incorpora señales visuales para ayudar a los humanos a entender las intenciones de Apollo. Pero a medida que evolucione la tecnología de IA, esperamos que Apollo comprenda y responda a las emociones e intenciones humanas de una forma mucho más matizada”.
Esta evolución de la IA es fundamental para el futuro de Apollo. El cambio hacia la ejecución local de la IA en el robot cambia las reglas del juego. Con el procesamiento local de la IA, será posible reaccionar en tiempo real, lo que reducirá la brecha entre la entrada y la respuesta y garantizará que Apollo pueda operar sin problemas en entornos dinámicos. Esto significa que, aunque por ahora Apollo estará aislado en almacenes, veremos futuras versiones haciendo todo lo que puede hacer un humano, desde trabajar en una plataforma petrolífera hasta desactivar una bomba.
Por ahora, el objetivo era sacar del laboratorio y llevar a las empresas el primer robot humanoide asequible (por cierto, la empresa aún no comparte el precio, pero Cárdenas cree que en el futuro Apollos debería costar unos 50.000 dólares por unidad para que funcione en las empresas). Para ello, tanto Apptronik como Argodesign necesitaban resolver los retos de diseñar un robot en una época influida por la ciencia ficción. Para poner en marcha esta nueva revolución industrial, tenían que diseñar un robot que restableciera el escenario para un nuevo tipo de interacción, que no fuera ni amenazador ni mono ni llevara a la gente al territorio del valle inquietante. A medida que se amplían las capacidades de Apollo, desde una mayor destreza hasta interacciones más inteligentes, parecen tener la oportunidad de redefinir el panorama de la colaboración entre humanos y robots, estableciendo nuevas normas y rompiendo viejos moldes.
Habrá que esperar hasta 2024, cuando se despliegue en las empresas, para ver si Apollo puede cumplir pronto su promesa. Si funciona como creen Cárdenas y Rolston, se abrirá una era que verá por fin cumplida la larga promesa de la robótica: Salvar a los humanos de algunas tareas aburridas, estresantes o peligrosas. Y también de fregar los platos sucios.