Crean un pequeño robot blando que puede atrapar objetos delicados con un ‘abrazo’
Tan fácil de construir como poner un polímero en una pajita, el dispositivo se mueve al insuflar aire a través de él.

El robot blando en forma de estrella justo antes de atrapar un objeto esférico – Trevor J. Jones et al / Nature
Ingenieros de la Universidad de Priceton han creado un robot blando que utiliza burbujas de aire para moverse, una suerte de mecanismo parecido a los globos alargados que se utilizan en globofexia, pero con la capacidad de articular sus movimientos. Los resultados acaban de publicarse en la revista ‘ Nature‘.
Estos robots blandos se construyen inyectando burbujas en un polímero líquido llamado elastómero que, cuando se solidifica, se convierte en una especie de goma hueca. La gravedad ayuda a que la burbuja suba a la parte superior cuando el elastómero llega al fondo; una vez endurecido, se puede sacar del molde e inflarlo, moviendo el dispositivo. Después, una especie de ‘abrazo’, envuelve cualquier objeto delicado suavemente sin romperlo. Además, los autores no solo han creado este diseño en forma de ‘mano’, sino que también han utilizado esta técnica en una especie de cola de pez que es capaz de aletear o en espirales que pueden recuperar objetos esféricos.

El dispositivo agarrando una mora (imagen inferior) y atrapándola en el aire (imagen superior) – Trevor J. Jones et al / Nature
Según explican los responsables del estudio, aunque los robots tradicionales han sido capaces de llevar a cabo muchas tareas, no son aplicables a todos los campos. «Pueden sostener tu mano, pero no permitir que te vayas a otro lugar sin romperte la muñeca», afirma Pierre-Thomas Brun, profesor asistente de ingeniería química y biológica e investigador principal del estudio. «No están diseñados de forma natural para interactuar con cosas blandas, como humanos o tomates».
Así, los robots blandos podrán dedicarse en el futuro a tareas más ‘delicadas’, como cosechar vegetales, agarrar artículos delicados en una cinta transportadora o incluso proporcionar cuidados personales. También pueden ser útiles en el ámbito sanitario, como en exotrajes portátiles para rehabilitación o dispositivos implantables que envuelven el corazón para ayudarlo a latir. Pero para ello es importante resolver el problema de cómo controlar su movimiento, que aunque puede ofrecer muchas más opciones que una articulación fija, es mucho más difícil de manejar.
La ventaja de este material es que se puede inyectar fácilmente en moldes tan simples como una pajita o en más complicados como la aleta o la espiral. Una vez que el elastómero se endurece, se puede sacar del molde e inflarlo con aire, lo que hace que el lado delgado con la burbuja se estire y se enrolle en la base más gruesa. Al controlar varios factores como el grosor del elastómero que recubre el molde, la rapidez con que el elastómero se asienta en el fondo y el tiempo que tarda en solidificarse, los investigadores pueden determinar cómo se moverá el dispositivo resultante.
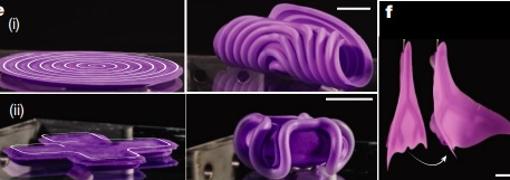
Otros diseños – Trevor J. Jones et al / Nature
Además, esta técnica no requiere de impresoras 3D, cortadores láser u otras herramientas costosas que se utilizan normalmente en la robótica blanda, aparte de que el sistema también es escalable. Tiene el potencial de producir actuadores de varios metros de largo con características tan delgadas como 100 micras, casi tan pequeñas como un cabello humano.
A pesar de su flexibilidad, el moldeado de burbujas tiene sus límites. Hasta ahora, los investigadores han logrado forzar una burbuja a través de solo unos pocos metros de tubería llena de elastómero, por lo que los dispositivos no son muy grandes. Además, el inflado excesivo puede hacer que las estructuras exploten, al igual que ocurre con los globos. El siguiente paso será crear actuadores más complejos y explorar nuevas aplicaciones. Están interesados en diseñar actuadores que se muevan juntos en ondas secuenciales, como los pies de un ciempiés. Otra posibilidad es utilizar estos sistemas con cámaras que se contraigan y se relajen, utilizando una única fuente de presión para inflarlos, imitando los latidos del corazón humano.


