Creación automatizada de manos robóticas
Normalmente, un robotista puede pasar meses diseñando un manipulador a medida, en gran parte mediante el método de ensayo y error. Cada cambio a menudo requiere nuevas piezas que deben diseñarse y probarse.
En cambio, un nuevo sistema de diseño interactivo agiliza y simplifica el proceso de diseñar y fabricar una mano robótica personalizada con sensores táctiles. El nuevo sistema no requiere ningún tipo de montaje manual ni conocimientos especializados. Con componentes modulares y una interfaz 3D fácil de usar, este sistema permite a cualquiera crear su propia mano robótica personalizada.
Como si se tratara de construir figuras con un LEGO digital, el usuario del sistema utiliza la interfaz para construir un manipulador robótico a partir de un conjunto de componentes modulares cuya fabricación física está garantizada. El usuario puede ajustar la palma y los dedos de la mano robótica, adaptándola a una tarea específica, y luego integrar fácilmente los sensores táctiles en el diseño final.
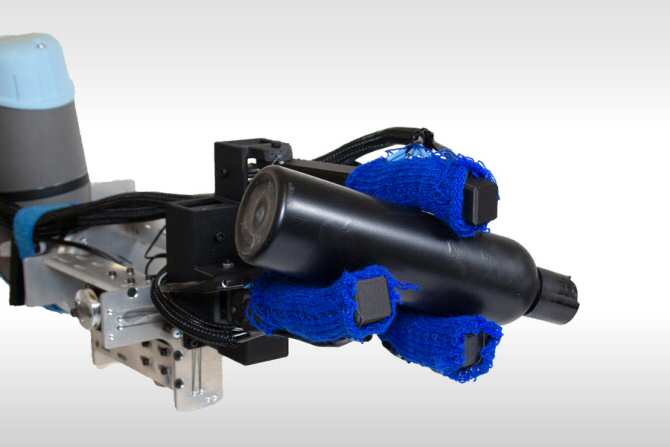
Una vez terminada la fase de diseño, el software genera automáticamente archivos de impresión 3D y de tejido de punto para fabricar el manipulador. Los sensores táctiles se incorporan a través de un guante de tejido de punto que se ajusta perfectamente a la mano robótica. Estos sensores permiten al manipulador realizar tareas complejas, como recoger objetos delicados o utilizar herramientas.
“Una de las cosas más emocionantes de este sistema es que hace que el diseño sea accesible a un público general. En vez de pasar meses o años trabajando en un diseño, y de invertir mucho dinero en prototipos, puedes tener un prototipo funcional en minutos”, destaca la ingeniera Lara Zlokapa, del Instituto Tecnológico de Massachusetts (MIT) en Estados Unidos, y miembro del equipo de investigación y desarrollo.
El proyecto ha contado con el apoyo de la DARPA (Agencia de Proyectos de Investigación Avanzados de Defensa, dependiente del Departamento de Defensa de Estados Unidos) y de otras entidades.