Investigadores israelíes desarrollan un microrrobot capaz de reparar con precisión células dañadas
El diminuto robot, de sólo 10 micras de diámetro, es capaz de desplazarse por una muestra biológica, identificar distintos tipos de células, capturarlas selectivamente y transportarlas para su posterior análisis.
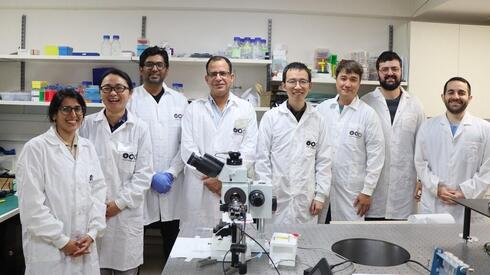
Equipo de investigación de la Universidad de Tel Aviv. / Universidad de Tel Aviv
Investigadores de la Universidad de Tel Aviv desarrollaron un microrrobot híbrido del tamaño de una célula biológica (unas 10 micras de diámetro) capaz de desplazarse por un entorno fisiológico y actuar sobre células dañadas.
El microrrobot, que puede controlarse y desplazarse mediante dos mecanismos distintos (eléctrico y magnético), es capaz de navegar entre las distintas células de una muestra biológica, distinguir entre los distintos tipos de células, identificar si están sanas o moribundas y transportar la célula deseada para estudios posteriores, como análisis genéticos. El microrrobot también puede transfectar un fármaco o un gen en la célula capturada.
Según los investigadores, este desarrollo puede ayudar a promover la investigación en el importante campo del “análisis unicelular”, así como a encontrar aplicaciones en el diagnóstico médico, el transporte y cribado de fármacos, la cirugía y la protección del medio ambiente.
La innovadora tecnología fue desarrollada por el profesor Gilad Yossifon, de la Escuela de Ingeniería Mecánica y el Departamento de Ingeniería Biomédica de la Universidad de Tel Aviv, y su equipo: El Dr. Yue Wu, investigador posdoctoral, y el estudiante Sivan Yakov, en colaboración con el Dr. Afu Fu, investigador posdoctoral, del Technion, Instituto Tecnológico de Israel. La investigación se publicó en la revista Advanced Science.
El Prof. Gilad Yossifon explica que los microrobots (a veces llamados micromotores o partículas activas) son diminutas partículas sintéticas del tamaño de una célula biológica, que pueden desplazarse de un lugar a otro y realizar diversas acciones (por ejemplo, una recogida de carga sintética o biológica) de forma autónoma o mediante el control externo de un operador. Según el profesor Yossifon, “el desarrollo de la capacidad de movimiento autónomo del microrrobot se inspiró en los microrrobots biológicos, como las bacterias y los espermatozoides. Se trata de un campo de investigación innovador que se está desarrollando rápidamente, con una amplia variedad de usos en campos como la medicina y el medio ambiente, así como herramienta de investigación”.
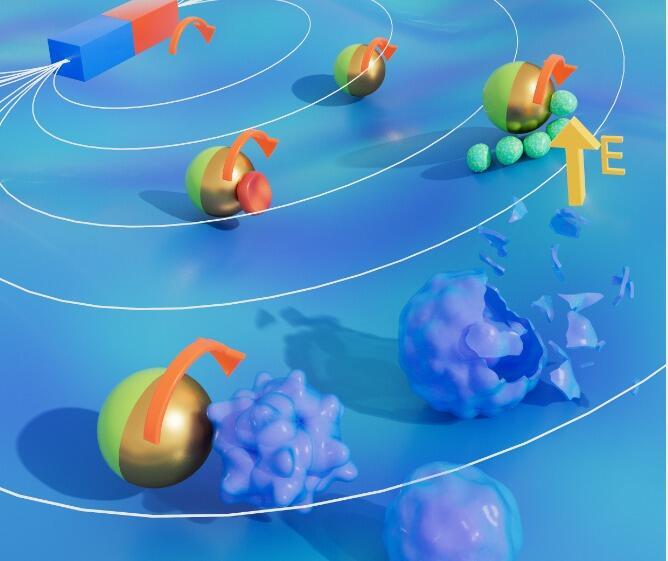
Simulador. / Advanced Science
Como demostración de las capacidades del microrrobot, los investigadores lo utilizaron para capturar células sanguíneas y cancerosas individuales y una sola bacteria, y demostraron que es capaz de distinguir entre células con distintos niveles de viabilidad, como una célula sana, una célula dañada por un fármaco o una célula que se está muriendo o que muere en un proceso natural de “suicidio” (esta distinción puede ser importante, por ejemplo, a la hora de desarrollar fármacos contra el cáncer). Una vez identificada la célula deseada, el microrrobot la captura y la traslada a un lugar donde pueda seguir analizándose. Otra innovación importante es la capacidad del microrrobot para identificar células diana que no están etiquetadas: el microrrobot identifica el tipo de célula y su estado (como el grado de salud) mediante un mecanismo sensor incorporado basado en las propiedades eléctricas únicas de la célula.
Una puerta a la tecnología del futuro
Prof. Yossifon: “Nuestro nuevo desarrollo hace avanzar significativamente la tecnología en dos aspectos principales: la propulsión híbrida y la navegación mediante dos mecanismos diferentes: eléctrico y magnético. Además, el microrrobot tiene una capacidad mejorada para identificar y capturar una sola célula, sin necesidad de etiquetarla, realizar pruebas locales o recuperarla y transportarla a un instrumento externo”.
“Esta investigación se llevó a cabo con muestras biológicas en el laboratorio para ensayos in vitro, pero la intención es desarrollar en el futuro microrrobots que también funcionen dentro del cuerpo, por ejemplo, como eficaces portadores de fármacos que puedan guiarse con precisión hasta el objetivo”.
Los investigadores explican que el mecanismo de propulsión híbrido del microrrobot es de especial importancia en entornos fisiológicos, como los que se encuentran en las biopsias líquidas. “Los microrrobots que han funcionado hasta ahora basándose en un mecanismo de guiado eléctrico no eran eficaces en determinados entornos caracterizados por una conductividad eléctrica relativamente alta, como un entorno fisiológico, donde el accionamiento eléctrico es menos eficaz. Aquí es donde entra en juego el mecanismo magnético complementario, que es muy eficaz independientemente de la conductividad eléctrica del entorno”.
El profesor Yossifon concluye: “En nuestra investigación hemos desarrollado un microrrobot innovador con importantes capacidades que contribuyen significativamente a este campo: propulsión y navegación híbridas mediante una combinación de campos eléctricos y magnéticos, así como la capacidad de identificar, capturar y transportar una sola célula de un lugar a otro en un entorno fisiológico. Estas capacidades son relevantes para una amplia variedad de aplicaciones, así como para la investigación.